Projects
Tagged As

Dual-Use Waveforms for Radar Detection and Wireless Communication
New waveforms enable efficient spectrum sharing between radars sensing moving objects and wireless communications systems transmitting data.
Tags

Underwater PB&J: Combining Diver and Robot Strengths for Optimized Mid-Mission Teaming
New navigation and vehicle autonomy algorithms consider which tasks humans and autonomous systems respectively do best, with the goal of improving search path planning and object classification in underwater environments.
Tags
Autonomous Mobility Through Intelligent Collaboration
Teaming autonomous ground and aerial vehicles improves autonomous off-road military missions.
Tags

Coordinating Teams of Autonomous Systems
We developed new distributed coordination algorithms for deploying multiple autonomous systems from a single set of operator commands.
Tags

Collaborative-UAS for Hostile Attribution, Surveillance, Emplacement, and Reconnaissance
We are building a toolbox of autonomous functions for unmanned aerial systems to improve UAS missions and alleviate burden on human operators in the field.
Tags

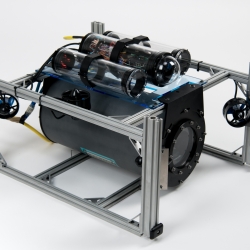
Autonomous High-Resolution Ocean Floor Mapping
The Laboratory is working to develop a novel seabed-mapping capability that can achieve high-resolution imaging and a fast coverage rate.
Tags
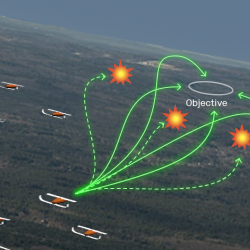
Exploiting Risk-taking in Group Operations
Teams of autonomous systems learn collaboration strategies by hypothesizing how the team would perform if one system followed alternative trajectories or was eliminated from the team.
Tags

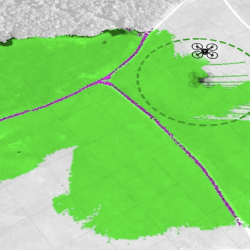
Virtual Test Environments for UAVs
For experiments with unmanned aerial vehicles, researchers use simulated geographies that avoid the risks of real-world flight tests.
Tags
Undersea Optical Communications
A system that enables robust, long-distance communications between underwater vehicles exploits laser technology.
Tags
